Vehicle driving assistance system
Safe driving assistance system
ADAS技术特征介绍
本系统自主开发的防碰撞,车道偏离预警等是由内置各自功能处理软件进行处理,目前可以实现车道偏 离警报系统(LDWS)、前碰撞预警系统(FCWS)、全景系统等,今后可实现盲区警报系统、行人识别系统、 后方警报系统等多样化的系统。以上系统可在同一硬件结构下,根据系统的负荷调整CPU及基本核心部 件容量来实现。
车道、车辆、行人识别技术
本系统是应用能够事先预防车辆事故发生而集成的各种智能安全算法,从而最大化让驾驶更加安全性和 便利性。
核心技术是概括了车道、车辆及行人识别、弯曲校正等。行驶中车道及车辆识别技术是非常深层次的理 论,实现的独创性又需强有力的软件算法,同时还要有能够支持强有力的算法硬件支持。
本系统通过前方摄像头摄入前方影像,在影像中有先设定车道为中心的ROI (Region of Interest)。然 后通过设定的ROI优先识别车道。点线,实线都可识别,在点线识别时会考虑有点和无点的长度,从而 让ROI的设定不出问题。
一、产品特征
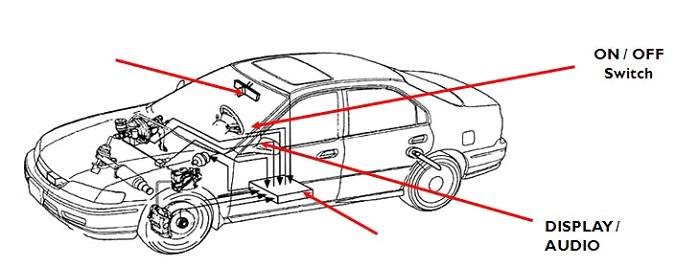
利用视频图像处理技术开发的车辆驾驶辅助系统。
该系统的优势:采用了摄像头,具有低成本;拓展性强;方便后期在不更改硬件设备的前提下,进行软 件升级等。本系统通过固定在前挡风玻璃上的ADAS装置(内置摄像头)提取的行驶道路信息及利用MCU 分析驾驶者瞌睡、疲劳、打电话等驾驶行为,然后分析车辆行驶状况及强撞击前、后实时视频记录,最 终达到在驾驶中有危险状况发生时,警告驾驶者从而预防事故的发生。
本系统自主开发的防碰撞,车道偏离预警等是由内置各自功能处理软件进行处理,目前可以实现车道偏 离警报系统(LDWS)、前碰撞预警系统(FCWS)、全景系统等,今后可实现盲区警报系统、行人识别系统、 后方警报系统等多样化的系统。以上系统可在同一硬件结构下,根据系统的负荷调整CPU及基本核心部 件容量来实现。
二. 产品主要功能
-
(1)车道偏离警报功能(LaneDepartureWarning) 驾驶者在驾驶行驶的车辆发生偏离车道前,警报装置事先探测,并且用声音警告驾驶者;驾驶者可以根
据自己的实际使用效果对左右车道警报位置进行调节。事前警告驾驶者,达到预防事故发生的智能设备(Smart Device)

-
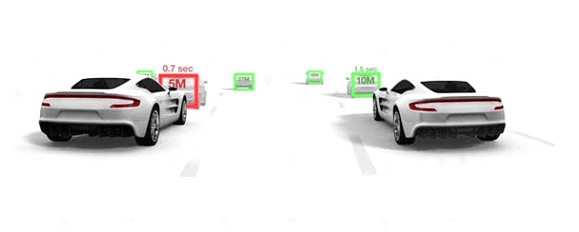
(2)前碰撞预警系统(Forward Collision Warning) 驾驶中前方车辆急刹车,或突然急加速导致与前方车辆距离及速度关系有事故隐患时,感应探测会以声
音警告驾驶者,设备TTC(Time To Collision)功能是根据不同驾驶者的驾驶习惯而设定的,可以满足 不同驾驶者的人性化功能。
车道、车辆、行人识别技术
本系统是应用能够事先预防车辆事故发生而集成的各种智能安全算法,从而最大化让驾驶更加安全性和 便利性。
核心技术是概括了车道、车辆及行人识别、弯曲校正等。行驶中车道及车辆识别技术是非常深层次的理 论,实现的独创性又需强有力的软件算法,同时还要有能够支持强有力的算法硬件支持。
(1):车道偏离识别基本原理为以下:
本系统通过前方摄像头摄入前方影像,在影像中有先设定车道为中心的ROI (Region of Interest)。然 后通过设定的ROI优先识别车道。点线,实线都可识别,在点线识别时会考虑有点和无点的长度,从而 让ROI的设定不出问题。